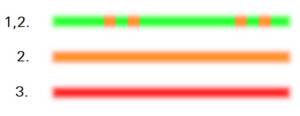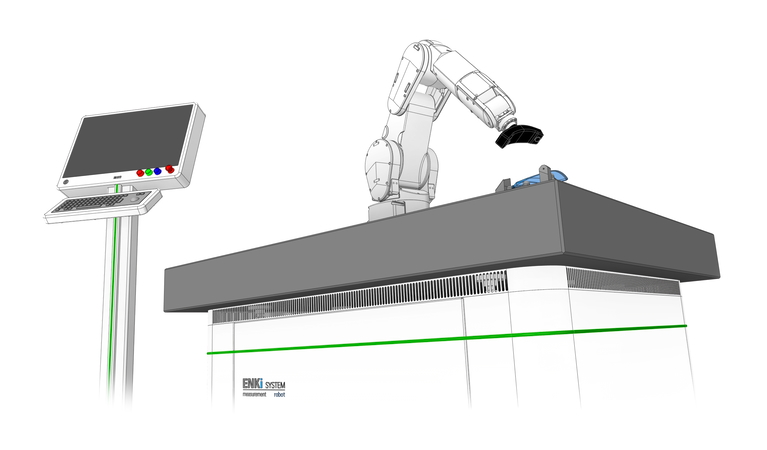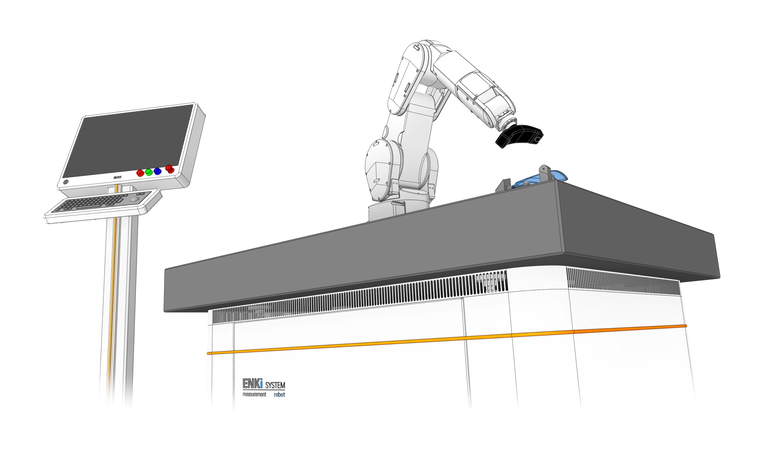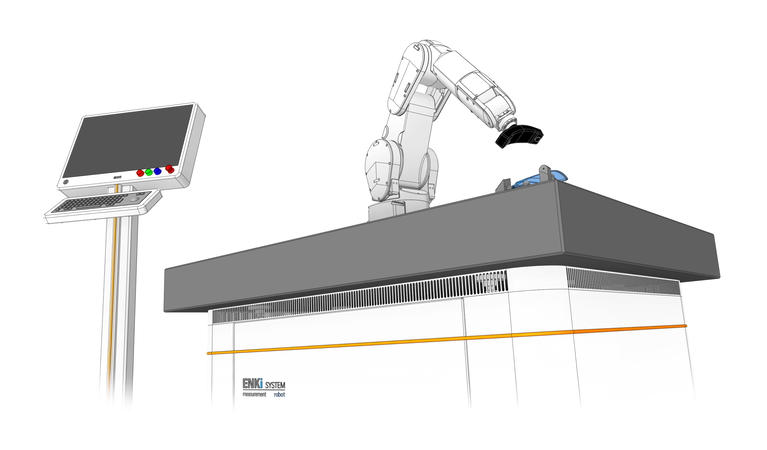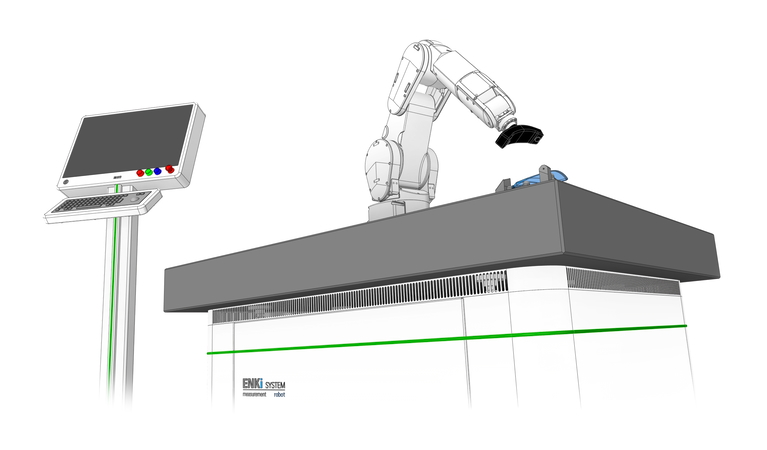


Our innovative solution is a programmable informational lamp. With the right interface at their disposal, the user is able to program light messages depending on selected events. This solution differs from the classical one commonly used in machines, because it is possible to define new operating states of the system besides the three most common ones (green, orange, red). For example, blue as an expansion of green in the case where the process is being performed correctly but one of the controlled parameters is close to the limit value.


The user may also program so-called “interjections” in the form of single, short pulses. For example, during normal operation, the system may inform of the appearance of a special message to be read by means of a one-second-long orange light.