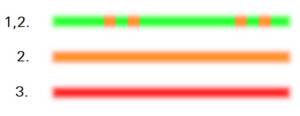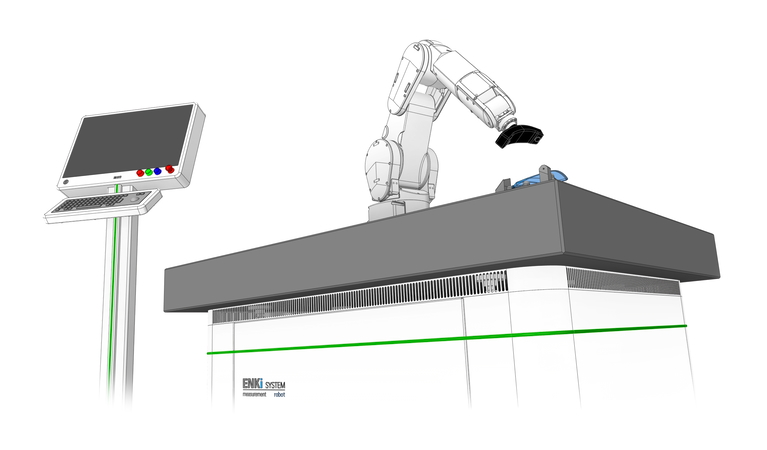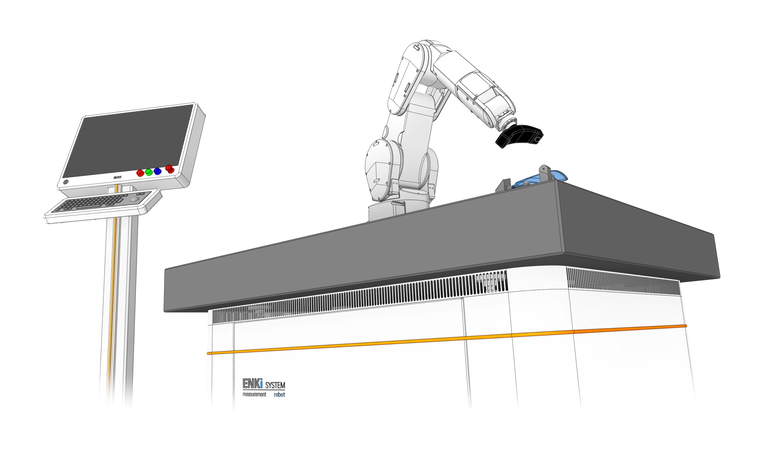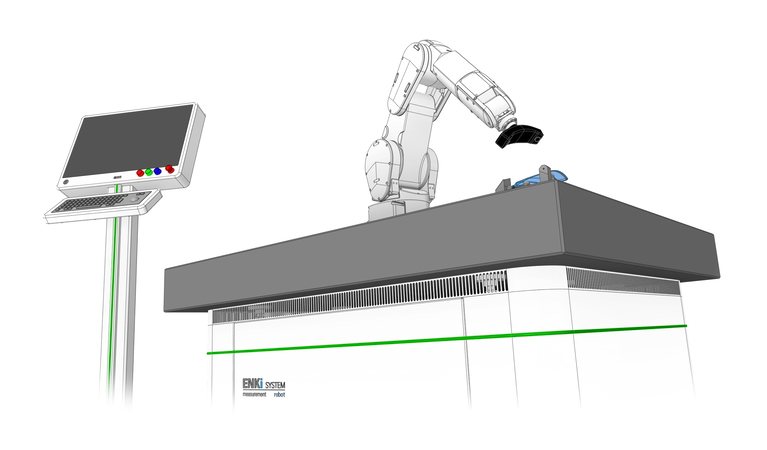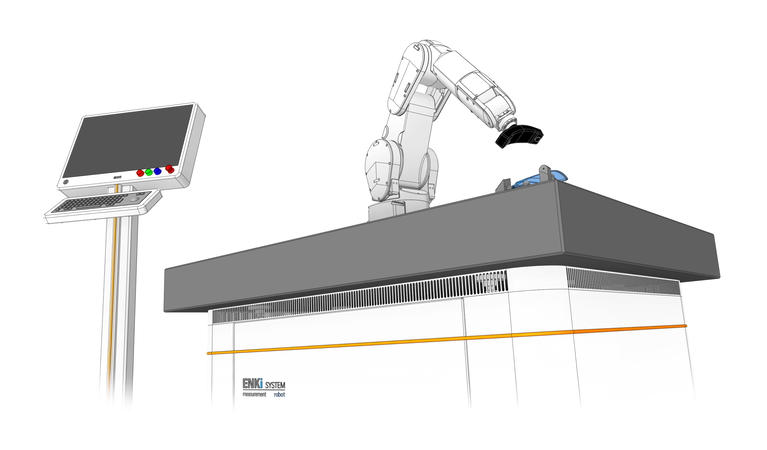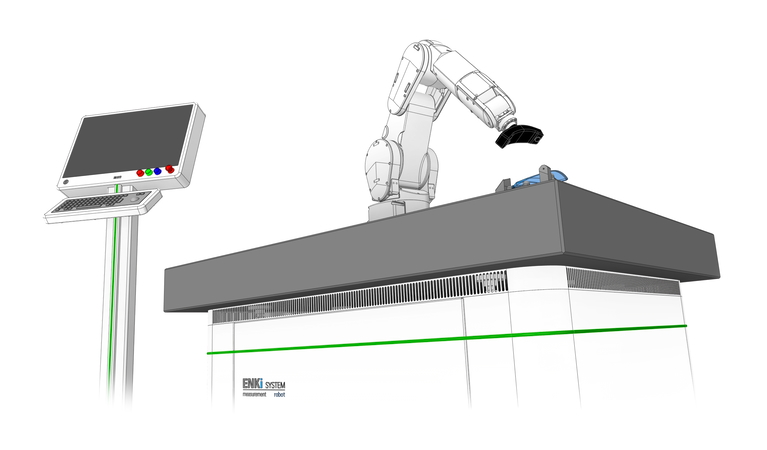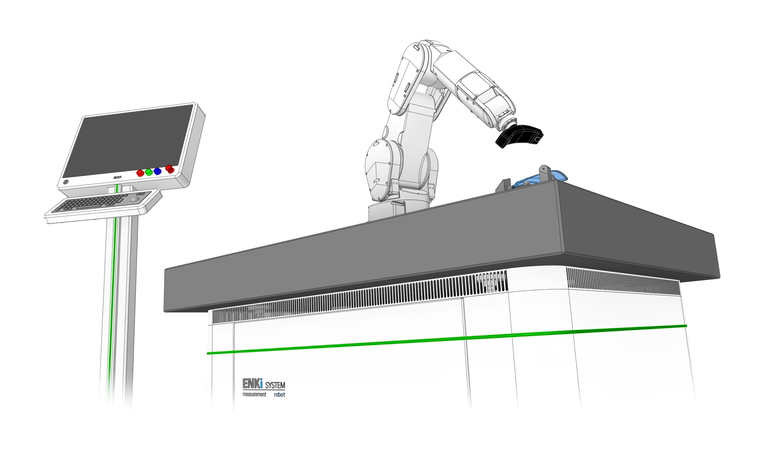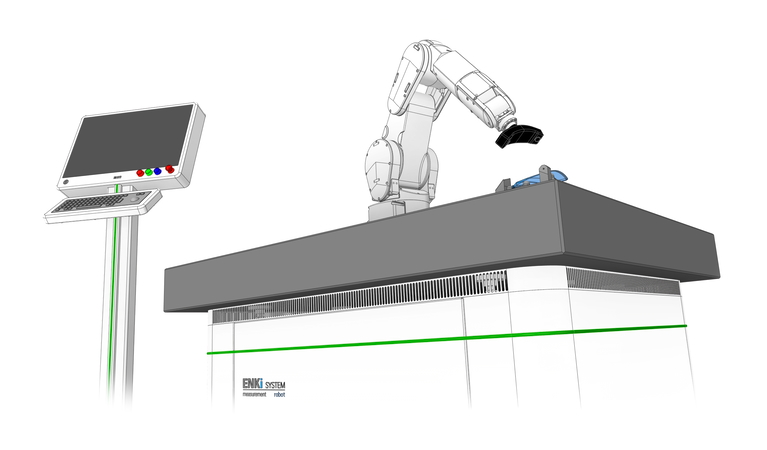


Unsere innovative Lösung ist eine programmierbare Informationslampe. Der Benutzer, der über die entsprechende Schnittstelle verfügt, ist in der Lage, Lichtbotschaften in Abhängigkeit von den ausgewählten Ereignissen zu programmieren. Diese Lösung unterscheidet sich von der in Maschinen üblichen klassischen Lösung dadurch, dass neben den drei gängigen Zuständen (grün, orange, rot) auch neue Betriebszustände des Systems definiert werden können, z. B. blau als weiterentwicklung von grün, wenn der Prozess korrekt verläuft, aber eine der kontrollierten Kennlinien nahe am Grenzwert liegt.


Der Benutzer kann auch sog. „Einschübe“ in Form einzelner, kurzer Impulse programmieren. Beispielsweise kann das System während des normalen Betriebs mit einem einsekündigen orangen Licht über das Erscheinen einer besonderen Nachricht informieren, die gelesen werden sollte.