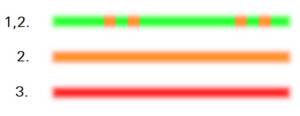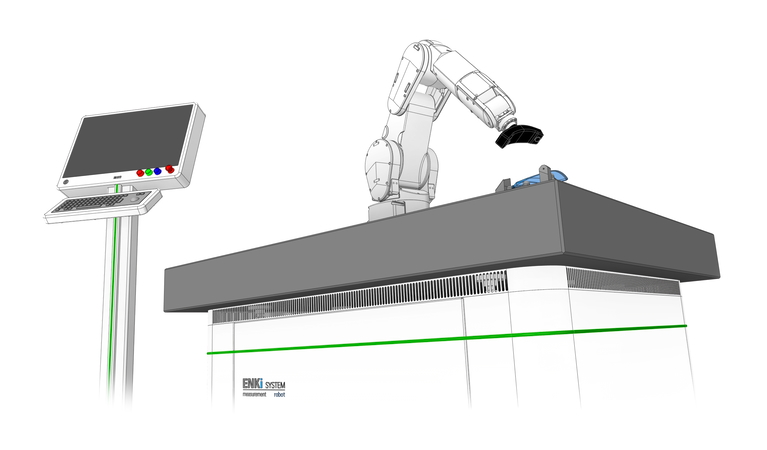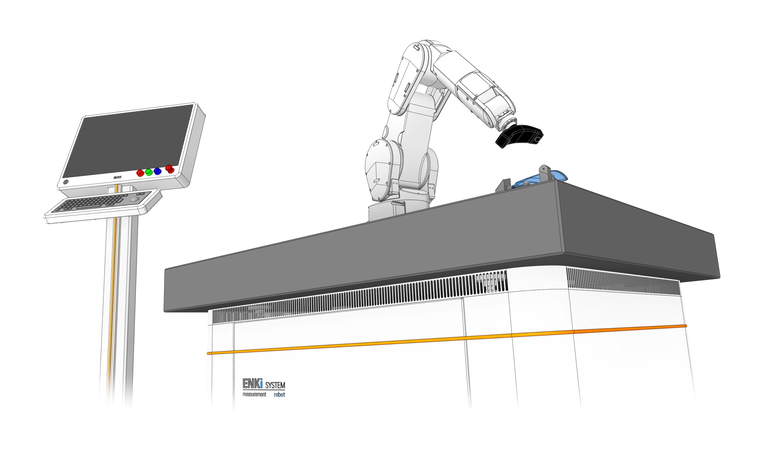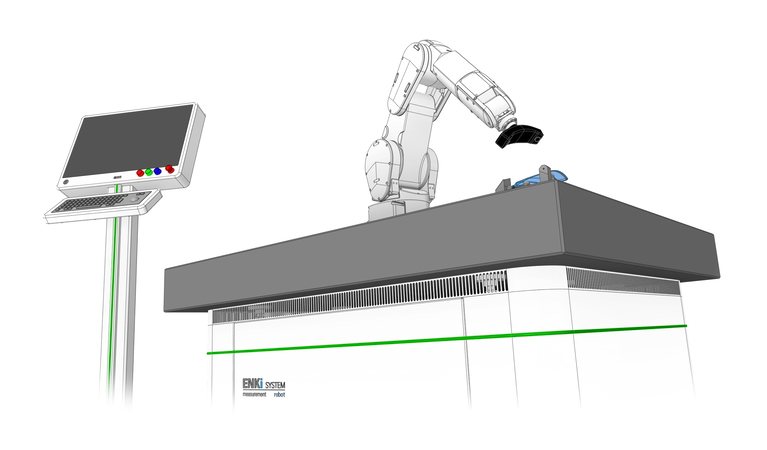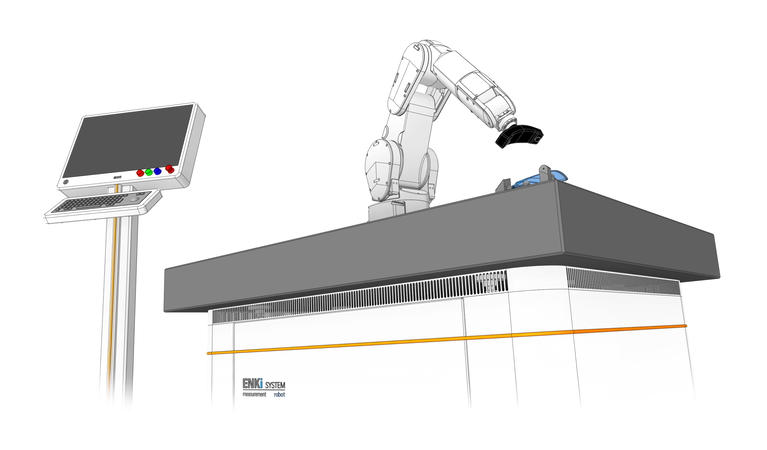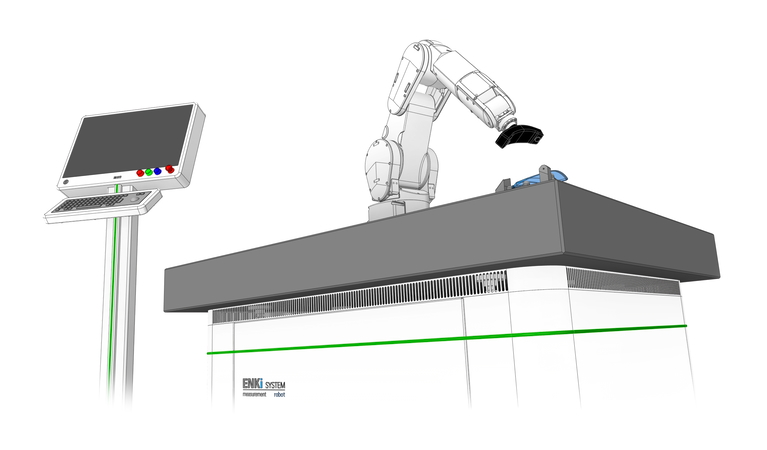


Naszym innowacyjnym rozwiązaniem jest programowalna lampa informacyjna. Użytkownik dysponując odpowiednim interfejsem jest w stanie programować komunikaty świetlne w zależności od wybranych zdarzeń. Rozwiązanie to różni się od klasycznego, używanego powszechnie w maszynach tym, że możliwe jest definiowanie nowych stanów działania systemu oprócz trzech powszechnie stosowanych (zielony, pomarańczowy, czerwony) Np. kolor niebieski jako rozwinięcie koloru zielonego w przypadku gdy proces przebiega poprawnie ale któraś z kontrolowanych charakterystyk jest bliska granicznej wartości.


Użytkownik może również programować tzw. „wtrącenia” w postaci pojedynczych, krótkich impulsów. Np. podczas normalnej pracy system może informować jednosekundowym światłem pomarańczowym o pojawieniu się specjalnego komunikatu do odczytania.